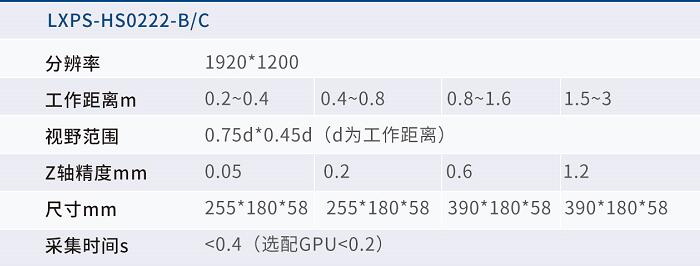
型号LXPS-HS0222-B/C
工作距离mm200-400
分辨率1920*1200
视野范围0.75d*0.45d(d为工作距离)
采集时间s<0.4(选配GPU<0.2)
Z轴精度mm0.05
尺寸mm255*180*58
数据接口:RJ45以太网
供电:DC12V
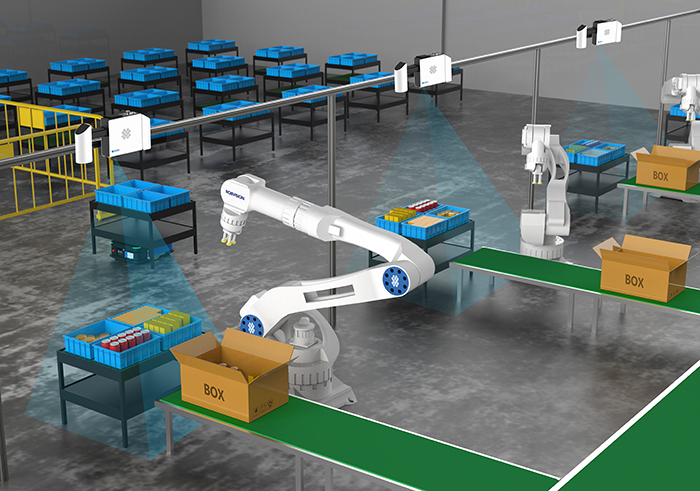
7、涂胶规划
背景:汽车引擎盖在组装时时需要进行涂胶,人工涂胶误差大。
难点:传统2D视觉定位精度差
解决方案:通过悟空3D传感器采集三维图像信息,利用3D智能软件自动识别引擎盖的方向并调整工业机器人的路径。类似也可以用于鞋底涂胶。
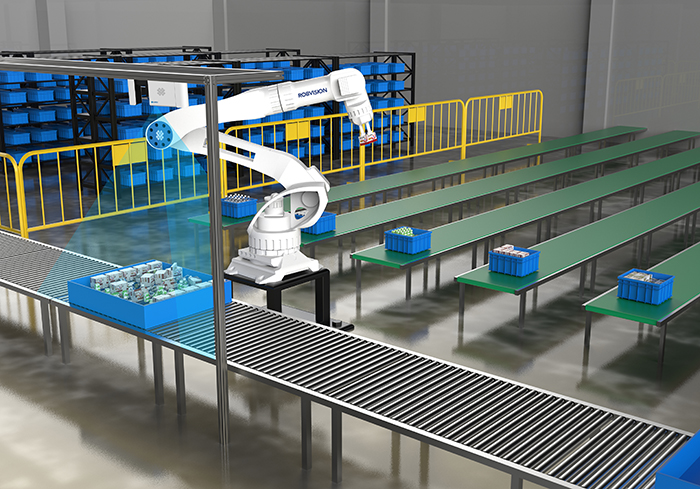
3D立体视觉与人眼立体视觉相比,具有**的优点,如精度高、扩展能力强大,连续工作时间长、不易损坏、保密性好、没有培训成本、结果易于保存和复制等优点,因此三D立体视觉技术的应用领域已经越来越广泛。
选配NVIDIA GPU平台,快速获取深度数据,内置深度学习算法,减小对工控机的需求;
提供功能丰富的工具软件,打包手眼标定算法,一键完成手眼标定;
通用TCP/IP通讯接口,轻松对接不同机械臂;
定制应用算法,提供完整应用方案;
简洁的SDK接口和使用示例,不依赖第三方库,快速打造属于自己的应用。
http://lanxin2018.b2b168.com






















