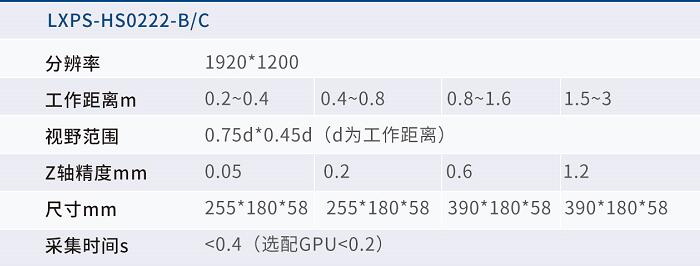
型号LXPS-HS0222-B/C
工作距离mm200-400
分辨率1920*1200
视野范围0.75d*0.45d(d为工作距离)
采集时间s<0.4(选配GPU<0.2)
Z轴精度mm0.05
尺寸mm255*180*58
6、工件分拣与上料
背景:制造商的加工中心或自动装配线上,工人需要从料框中取出零件放入定位的工装夹具中。
难点:料框中的工件散乱、无序、堆叠,传统的2D视觉无法分辨。
解决方案:通过悟空3D传感器采集三维图像信息,利用3D智能定位软件定位工件的抓取点并将坐标信息传给工业机械人,引导工业机器人快速精准的抓取工件。
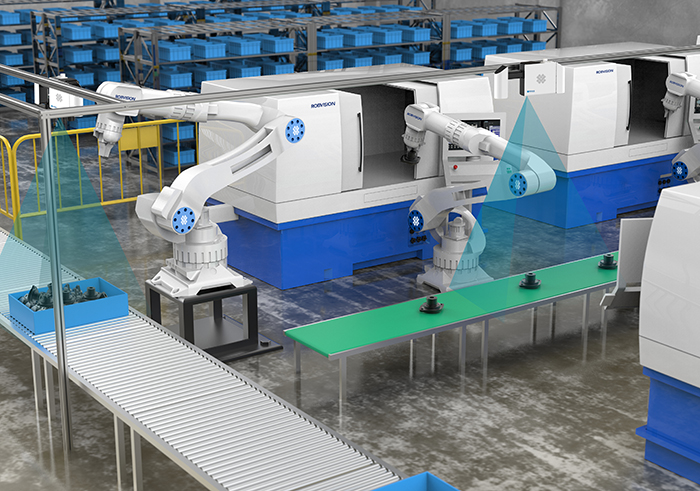
WuKong悟空系列3D相机融合3D机器视觉和深度学习算法,赋予机器人真实环境的“感知能力”和“手眼协同能力”,使他们能够通过思考来执行任务,解决了工业机器人分拣领域的无序抓取问题。

3D视觉传感器可以为机器人提供视觉引导的基础,广泛应用于订单拣选、混合分拣、码卸垛、装箱、零件分拣、上下料、三维重建、体积测量等。
选配NVIDIA GPU平台,快速获取深度数据,内置深度学习算法,减小对工控机的需求;
提供功能丰富的工具软件,打包手眼标定算法,一键完成手眼标定;
通用TCP/IP通讯接口,轻松对接不同机械臂;
定制应用算法,提供完整应用方案;
简洁的SDK接口和使用示例,不依赖第三方库,快速打造属于自己的应用。
http://lanxin2018.b2b168.com















