型号LXPS-HS0222-B/C
工作距离mm200-400
分辨率1920*1200
视野范围0.75d*0.45d(d为工作距离)
采集时间s<0.4(选配GPU<0.2)
Z轴精度mm0.05
尺寸mm255*180*58
选配NVIDIA GPU平台,快速获取深度数据,内置深度学习算法,减小对工控机的需求;
提供功能丰富的工具软件,打包手眼标定算法,一键完成手眼标定;
通用TCP/IP通讯接口,轻松对接不同机械臂;
定制应用算法,提供完整应用方案;
简洁的SDK接口和使用示例,不依赖第三方库,快速打造属于自己的应用。

3、无人拆垛
背景:许多电商或者医药行业拆垛时,经常会遇到有些垛已经不完整,且不同垛的包装尺寸也不一样。
难点:垛形不完整,上层有可能只有一两箱包裹且不是规则摆放。包装箱也有不同尺寸。
解决方案:通过悟空3D传感器采集三维图像信息,利用3D智能软件可以兼容各种尺寸的包装,也可以兼容不完全规则的垛形。通过优化计算引导工业机械人进行拆垛。
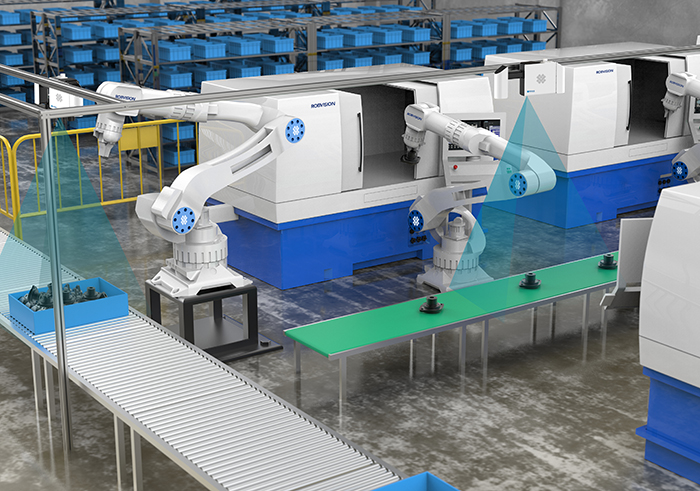
应用场景:
1、物品分拣
背景:电商或者快递公司在进行包裹分拣时,工作人员会将各种种类的包裹统一散乱的堆放在分拣中心,然后由工作人员逐个挑选放置到输送线上。
难点与问题:包裹的形状尺寸各异,料框堆叠乱序,无法用传统的二维识别定位。人工拣选*出错。
解决方案:通过悟空3D传感器采集RGBD信息,利用3D智能定位软件进行物品分类并定位工件的抓取点并将坐标信息传给工业机械人,引导工业机器人快速精准的抓取工件。

杭州蓝芯科技具有一批的计算机视觉算法研发团队,在3D视觉传感器的基础上,为客户提供针对各种应用的智能算法。不但可以识别各种不同的商品、零件,同时还能提供2D视觉无法提供的三维坐标信息。
http://lanxin2018.b2b168.com






















