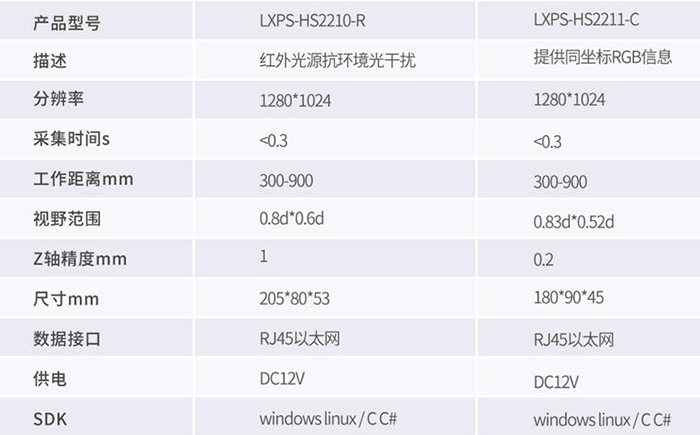
型号LXPS-HS2210-R
工作距离mm300-900
分辨率1280*1024
视野范围0.8d*0.6d
采集时间s<0.3
Z轴精度mm1
尺寸mm205*80*53
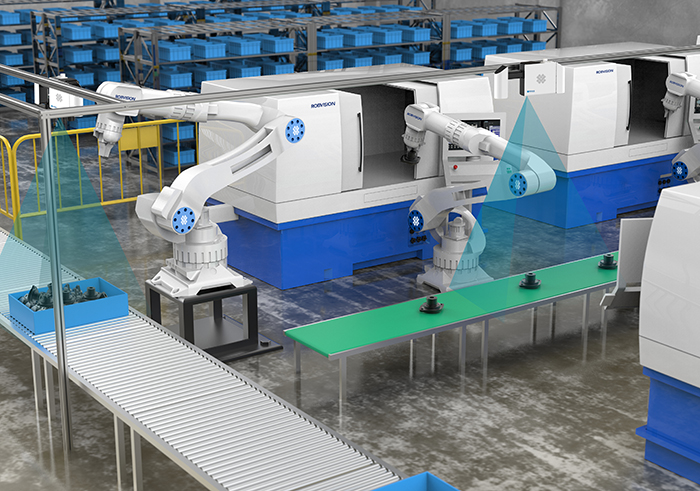
蓝芯科技通过3D视觉精准识别包装的尺寸大小、位置姿态,机器人路径规划技术,实现不同尺寸货物自动码垛,不再需要依据每个不同的品类去做机器人的编程工作,真正实现:看见即规划。应用于工厂流水线包装码垛环节,针对来料的货物尺寸动态未知下的应用。详细介绍
多品类、不同尺寸的包装通过输送带来料是码垛流程的常见方式 ,而如何实现不需要对机器人编程就可以实现自动码垛过程呢?
背景:许多电商或者医药行业拆垛时,经常会遇到有些垛已经不完整,且不同垛的包装尺寸也不一样。
难点:垛形不完整,上层有可能只有一两箱包裹且不是规则摆放。包装箱也有不同尺寸。
解决方案:通过悟空3D传感器采集三维图像信息,利用3D智能软件可以兼容各种尺寸的包装,也可以兼容不完全规则的垛形。通过优化计算引导工业机械人进行拆垛。
蓝芯科技视觉系统在提高机器人的灵活性的同时,免除定位工装夹具的制作,减少人工的参与。同时,利用离线编程和仿真,可以大大地缩短工程时间,提高调试效率。
在当今*发展的技术领域,需求在变,我们的解决方案也将紧跟步伐:更快的计算程序、更精准的相机、更的传感器。
机器视觉就是用机器代替人眼来做测量和判断。3D视觉系统的研究将具有重要的应用价值,立体视觉系统能够对视场范围内的标靶进行自动识别定位,可在复杂的背景环境下实现系统的现场标定。通过对运动体上特征点的识别定位并对数据进行分析进一步获取运动体的位置三维坐标、姿态、特征点之间的相对距离。随着各项研究的深入,其应用也必将越来越广泛,为行业的发展提供强大的技术支持。
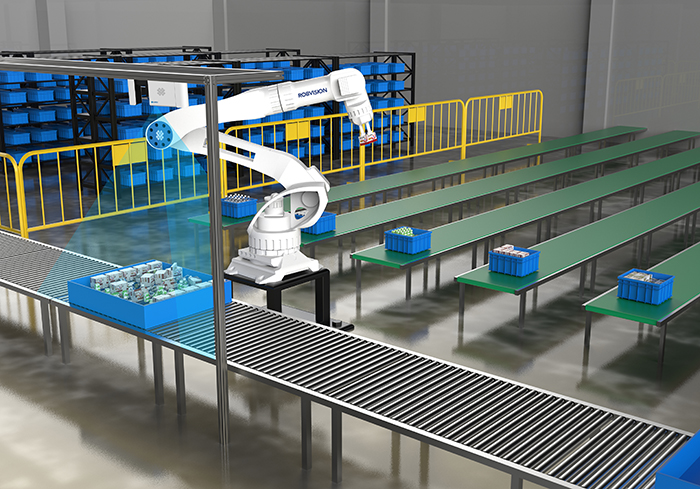
某物流公司要求做智能分拣项目,要求机器人抓取从输送线上传送过来的传递、包裹并放置在*位置,实现快递包裹动态高速分拣。需要3D视觉识别系统确定快递、包裹的坐标位置,并实时将该坐标值发送给机器人控制系统,引导机器人完成快递、包裹的分拣。
技术分析:
方案要求机器人快速完成输送线上运动包裹的抓取分拣。
包裹、信封、纸箱等普通存在堆叠情况
包裹形态、体积差别较大,要求3D视觉实现对多品种快递包裹的识别定位
输送带高速运行,且快递包裹散乱无序堆叠摆放,自动分拣系统工作节拍较快
**等高峰期,需要持续工作
解决方案
通过机器人3D定位系统实现定位,并引导机器人快速完成包裹的分拣。
通过3D视觉方案实现三维扫描,解决散乱无序堆叠包裹的识别定位问题
AI智能分析的匹配算法,解决各种形态尺寸快递包裹的识别定位
并行工作方式,一台视觉系统引导多台机器人,实现快速抓取
稳定性强,保证货运峰值正常运行
-/gbaihjf/-
http://lanxin2018.b2b168.com






















