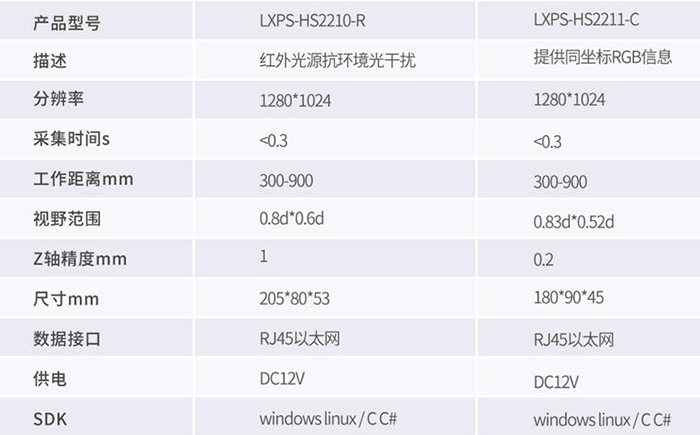
型号LXPS-HS2210-R
工作距离mm300-900
分辨率1280*1024
视野范围0.8d*0.6d
采集时间s<0.3
Z轴精度mm1
尺寸mm205*80*53
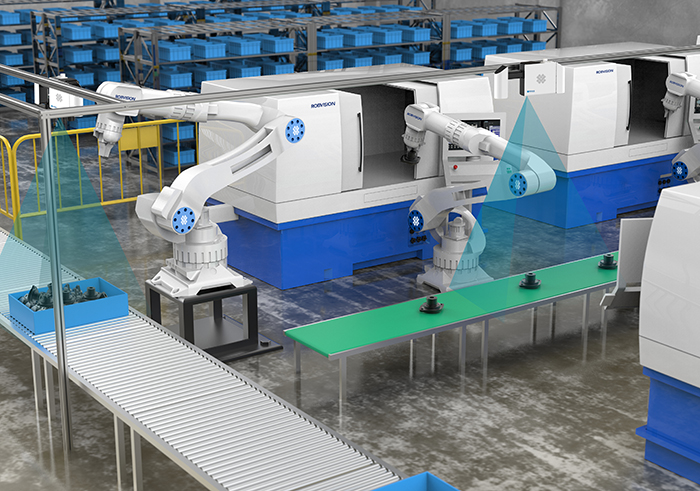
针对散乱无序堆放的工件设计,可协助机器人实现3D智能抓取。通过对工件3D数据扫描以实现三维准确定位,引导机械手准确抓取定位工件,实现了工业机器人自动化生产线的柔性工装。
该系列广泛用于各类工作无序状态的上下料、分拣、拆码垛、装配等场景,具有精度高、速度快,布置快速,维护方便的特点。全系列产品智能化程度高、通用性强,*二次开发,帮助客户实现柔性化产线。能够大幅度改善锻造邮件、锻造部件、冲压钣金件、树脂成型邮件、软硬包装箱等各种异形工件的分拣速度,降低人力成本,提升客户的竞争力。
技术原理:
通过高速、的3D结构光成像系统,对物体表面轮廓进行扫描,形成点云数据;并对点云数据进行智能分析处理,加以AI算法、机器人路径自动规划、自动防碰撞等智能化技术;计算出当前工件实时空间坐标,并引导机器人完成自动抓取任务。
蓝芯科技视觉系统在提高机器人的灵活性的同时,免除定位工装夹具的制作,减少人工的参与。同时,利用离线编程和仿真,可以大大地缩短工程时间,提高调试效率。
在当今*发展的技术领域,需求在变,我们的解决方案也将紧跟步伐:更快的计算程序、更精准的相机、更的传感器。
可以完成以下任务:
多品种工件的机器人3D定位抓取上料
料框堆叠物体3D识别定位
复杂多面工件的柔性化3D定位抓取
大型物体3D定位抓取
工件的无序来料3D定位
多工序间机器人协作3D定位抓取
输送带上物体的快速3D定位抓取
喷涂机器人来料3D识别定位
大型设备的机器人装配3D定位

3D视觉系统 ,由3D成像单元和运动路径规划单元组成,实现了机器人的“眼睛”与“大脑”功能。
针对散乱无序堆放的工件设计,可协助机器人实现3D智能抓取。通过对工件3D数据扫描以实现三维准确定位,引导机械手准确抓取定位工件,实现了工业机器人自动化生产线的柔性工装。
http://lanxin2018.b2b168.com






















