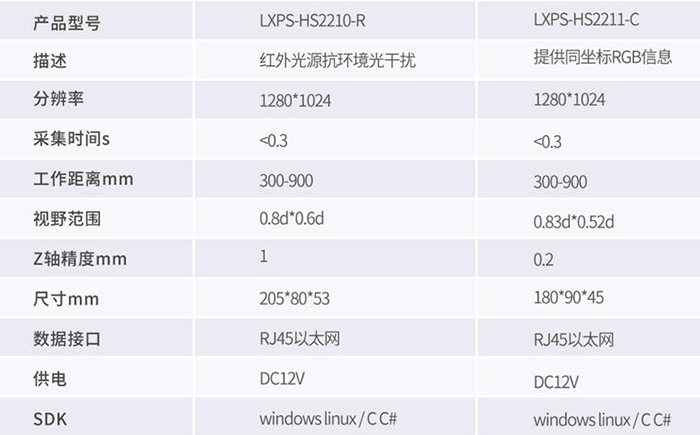
型号LXPS-HS2210-R
工作距离mm300-900
分辨率1280*1024
视野范围0.8d*0.6d
采集时间s<0.3
Z轴精度mm1
尺寸mm205*80*53
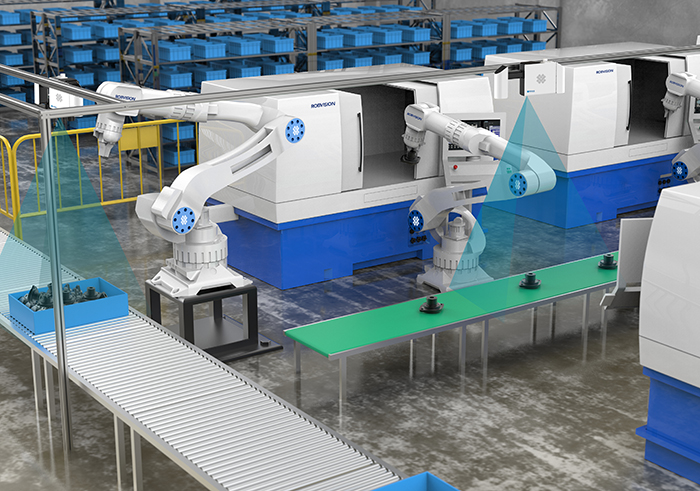
蓝芯科技视觉系统在提高机器人的灵活性的同时,免除定位工装夹具的制作,减少人工的参与。同时,利用离线编程和仿真,可以大大地缩短工程时间,提高调试效率。
在当今*发展的技术领域,需求在变,我们的解决方案也将紧跟步伐:更快的计算程序、更精准的相机、更的传感器。

某电商快递公司需要提升自动化分拣系统,解决用一键操作替代原本量方的4-5步操作。我司将3D技术应用于快件包裹体积的测量,采用3D视觉传感器,利用三角测量原理和点云分析技术,可快速、准确获取不同大小、不同类型快件包裹的体积信息。
技术分析:
项目要求在输送带运动状态快速、精准测量出快件体积
快件包裹大小差别较大,种类较多,且有软包、纸箱变形等不规则物品
快递包裹的包装材质类型较多,色彩差异较大
仓库灯光等外界干扰
解决方案:
通过机器人3D定位系统识别单品三维数据
通过3D视觉方案实现三维扫描测量,识别精度可达毫米级别
AI算法智能分析快件类型,实时测量
产品的滤光设计,可有效抵抗环境光干扰
客户收益:
实现精度、快速测量,有效提高智能分拣的自动化水平
满足用户对设备兼容性、易用性、售后**等方面需求
某物流公司要求做智能分拣项目,要求机器人抓取从输送线上传送过来的传递、包裹并放置在位置,实现快递包裹动态高速分拣。需要3D视觉识别系统确定快递、包裹的坐标位置,并实时将该坐标值发送给机器人控制系统,引导机器人完成快递、包裹的分拣。
技术分析:
方案要求机器人快速完成输送线上运动包裹的抓取分拣。
包裹、信封、纸箱等普通存在堆叠情况
包裹形态、体积差别较大,要求3D视觉实现对多品种快递包裹的识别定位
输送带高速运行,且快递包裹散乱无序堆叠摆放,自动分拣系统工作节拍较快
**等高峰期,需要持续工作
解决方案
通过机器人3D定位系统实现定位,并引导机器人快速完成包裹的分拣。
通过3D视觉方案实现三维扫描,解决散乱无序堆叠包裹的识别定位问题
AI智能分析的匹配算法,解决各种形态尺寸快递包裹的识别定位
并行工作方式,一台视觉系统引导多台机器人,实现快速抓取
稳定性强,保证货运峰值正常运行
项目背景:某大型快递公司分拣线,每个工位使用人工从混合堆叠的快递包裹中拣选出来,并将有面单的一面朝上放置在传送带上。
技术分析:实现无人抓取、分类、面单识别
Ø混合包裹有箱子、软包、信封件
Ø需要对面单有无进行检测
Ø包裹上有黑色、反光胶带
解决方案:深度学习检测分类,3D识别定位引导机器人抓取
Ø通过深度学习对包裹检测识别分类、检测面单
Ø通过3D点云定位抓取中心
Ø通过运动旋转控制寻找侧面面单
常用的3D视觉技术包括:
n双目立体视觉和结构光
nToF (Time-of-Flight)
n激光三角测量法
每项技术根据不同的原理来记录三维信息,它们均有不同的优点和缺点。
http://lanxin2018.b2b168.com






















